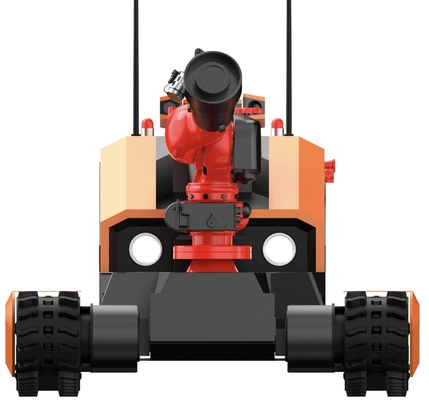
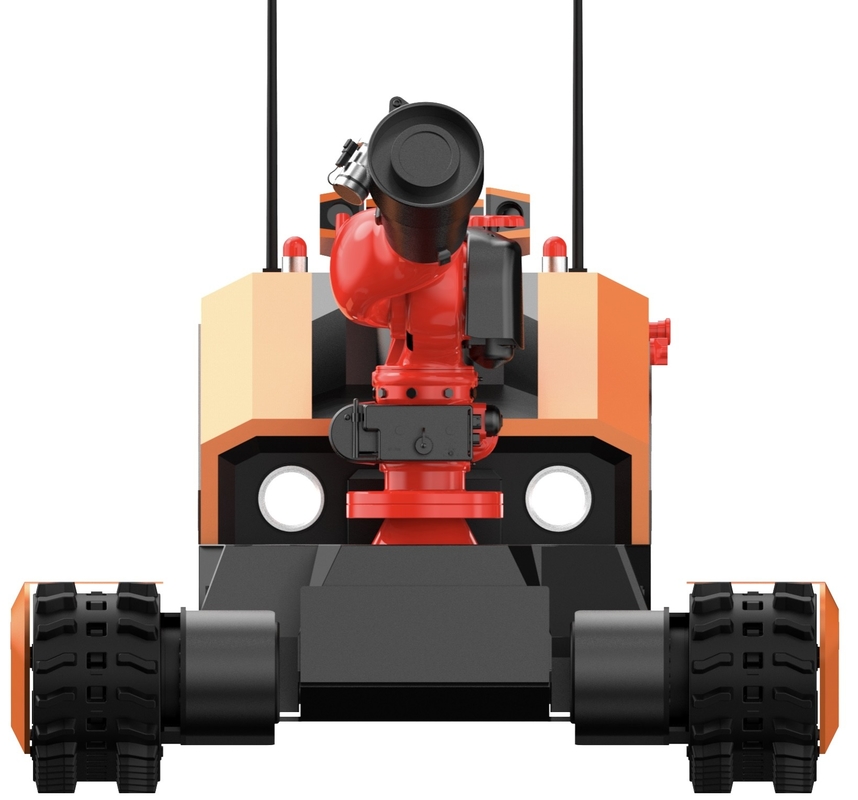
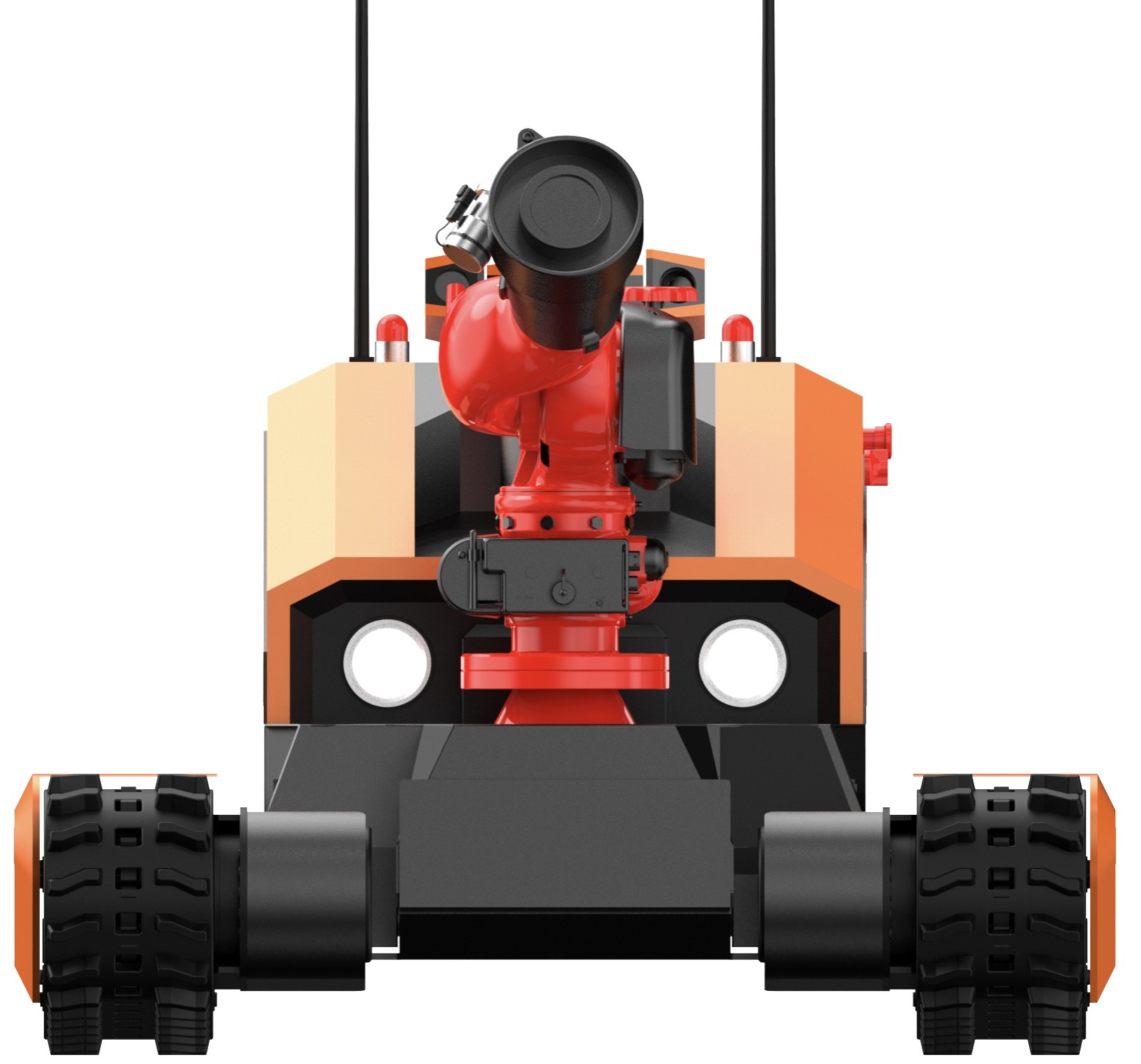
3.1 Montagem do robô
- Nome: Robô de combate a incêndios e exploração de quatro vias
- Modelo: RXR-MC120BGD
- Funções Básicas: Usadas para transportar vários dispositivos ou equipamentos e suprimentos de resgate.
- Conformidade com as normas da indústria de incêndio: "GA 892.1-2010 Robôs de incêndio - Parte 1: Requisitos técnicos gerais"
- Conformidade com as normas à prova de explosão: GB3836.1 2010 "Atmósferas explosivas - Parte 1: Equipamento - Requisitos gerais", conforme com a GB3836.1-2010 "Atmósferas explosivas - Parte 2:Equipamento protegido por caixas ignífugas" e GB3836.4 2010 "Atmósferas explosivas - Parte 4: Equipamentos protegidos por segurança intrínseca".
- Tipo à prova de explosão: Toda a máquina: Exd[ib]IIBT4Gb, Dispositivo de alimentação a bateria de lítio: Ex d IIC T6 Gb
- Grau de protecção: o grau de protecção do corpo do robô é IP66 e o grau de protecção da parte superior do robô é IP67.
- Potência: Bateria de lítio ternar eléctrica
- Dimensões: comprimento 1990 mm * largura 1190 mm * altura 1190 mm (excluindo articulações universais, partes autodropadas e antenas)
- Peso: ≤ 1200 kg
- Força de tração: ≥ 10KN
- Distância de reboque: ≥ 120 m (reboque de quatro mangueiras DN80 completas)
- Velocidade linear máxima: ≥ 2 m/s, regulação da velocidade sem passos através de comando remoto
- Desvio da linha reta: ≤ 3%
- Distância de travagem: ≤ 0,3 m (a baixa velocidade)
- Capacidade de escalada: ≥ 42°
- Altura do cruzamento de obstáculos: 600 mm
- Ângulo de estabilidade da inclinação lateral: 45°
- Profundidade de enrolamento: ≥ 500 mm
- Tempo de marcha contínua: 2h
- Tempo de funcionamento fiável: superou o teste de estabilidade e fiabilidade contínuas de 16 horas.
- Distância de controlo remoto: ≥ 1000 m
- Distância de transmissão de vídeo: ≥ 1000 m
- Função de monitorização panorâmica: pode exibir remotamente a imagem de 360 graus do corpo do robô.
- Função de exibição de atitude: detecção em tempo real do ângulo de inclinação e ângulo de rolagem do robô, facilitando aos operadores a gestão do estado do robô em tempo real.Os valores são transmitidos de volta para o terminal de controle remoto para o comando e operação corretos na próxima etapa.
- Função autónoma de evitação de obstáculos: quando é detectado um obstáculo a uma distância de 2 metros à frente, a velocidade é reduzida pela metade; quando um obstáculo é detectado a uma distância de 1 metro, a velocidade é reduzida pela metade.O robô automaticamente para de avançar..
- Função automática de pulverização e arrefecimento: Equipado com uma cortina de água de três camadas de auto-pulverização e design de arrefecimento, que pulveriza e arrefece o corpo do robô,formando uma cortina de água cobrindo todo o robôIsto garante que a bateria, o motor, o sistema de controlo e os componentes-chave do robô possam funcionar normalmente em ambientes de alta temperatura.
- Função de geração automática de energia e supressão automática do retrocesso: o motor principal do robô utiliza frenagem regenerativa,Conversão da força de recuo em energia elétrica durante a pulverização de água para extinção de incêndios.
- Pistas do robô: as pistas utilizadas para o robô de combate a incêndios são feitas de borracha composta de alta qualidade; o interior das pistas é um esqueleto metálico; tem um projeto de proteção contra descarrilamento da pista.
- Terminal de controlo: Terminal de controlo remoto integrado em dispositivos gráficos e de dados portáteis
3.2 Sistema robótico de extinção de incêndios
- Monitor de incêndio: monitor de incêndio importado
- Tipos de agentes extintores de incêndio: água ou espuma
- Material: Corpo do monitor - aço inoxidável
- Pressão de trabalho (Mpa): 1.2
- Modo de pulverização: corrente contínua e atomização, ajustável continuamente
- Taxa de fluxo: 120 L/s
- Distância (m): ≥ 100
- Ângulo de rotação: horizontal -90° - 90°, vertical 0° - 90°
- Ângulo máximo de pulverização: 120°
- Câmara de acompanhamento: equipada com uma câmara de acompanhamento para o monitor de incêndio.
- O monitor de incêndio pode pulverizar água, espuma e uma mistura, alcançando múltiplos usos com um monitor.e pode alternar entre os modos de corrente contínua e de pulverização.
3.3 Sistema de Reconhecimento Robótico
Configurar instrumentos de gás, módulos de monitorização ambiental, câmaras infravermelhas, imagens térmicas infravermelhas (opcionais), captadores e outros equipamentos a bordo,Pode reconhecer remotamente os gases tóxicos e nocivosUma plataforma de elevação à prova de explosão é configurada para transportar sensores e câmaras de detecção do ambiente,que permitam a detecção e análise de gases tóxicos e combustíveis, áudio e vídeo, e o ambiente em diferentes alturas no local.
- Configuração do sistema de reconhecimento: 4 câmaras infravermelhas à prova de explosão a bordo, 1 câmara de imagem térmica (opcional), 1 detector multiparâmetro e 1 detector de temperatura e umidade.
- Protecção contra explosões 360° Rotação e elevação Inclinação do painel: ângulo de rotação 360°; ângulo de inclinação ±90°; altura de elevação: altura inicial: 1190 mm, altura após a elevação: 1990 mm
- Módulo de detecção de gases e de sensores ambientais: equipado com um sistema de detecção de emergência sem fio de rápida implantação e um detector de temperatura e umidade.
- Função de medição da temperatura em infravermelho:Os sensores de temperatura infravermelhos são equipados, respectivamente, no interior e no exterior do veículo para monitorizar a temperatura interna da carroçaria do veículo e a temperatura no local (-50 - 350°C)..
3.4 Sensores de vídeo e áudio robóticos
- Número e configuração das câmaras: O sistema de vídeo consiste em 4 câmaras de infravermelho fixas de alta definição no corpo, realizando a observação da linha de visão dianteira e traseira.
- Iluminação da câmera: As câmeras no corpo podem fornecer imagens claras sob uma baixa iluminação de 0,001LUX, com função dinâmica anti-agitação.As câmaras devem ser capazes de recolher eficaz e claramente a situação no local, mesmo em condições de iluminação zero, e de a exibir no ecrã de cristal líquido do terminal de operação..
- Pixel da câmera: Milhões de imagens de alta definição, com uma resolução de 1080P e um grande ângulo de 60 °.
- Grau de protecção da câmara: IP68
- Requisitos técnicos de recolha de som: pode recolher remotamente sons no local para facilitar a compreensão da situação das pessoas presas.a faixa de frequência é de 20 Hz - 20 kHz, e a sensibilidade é ≥ 40 dB.
- Imagem térmica por infravermelho (opcional): equipada com uma imagem térmica por infravermelho para detectar e rastrear fontes de calor; a imagem térmica por infravermelho tem uma função anti-agitação da imagem;tem a função de recolha de imagens e transmissão em tempo realTem uma função de busca visual da fonte de fogo.
3.5 Parâmetros de configuração do terminal de controlo remoto
- Dimensões: 41031070 mm (excluindo a altura do joystick)
- Peso total: 6,5 kg
- Ecrã de visualização: um ecrã de cristal líquido de alto brilho, não inferior a 10 polegadas, com comutação de sinal de vídeo de 4 canais.
- Plataforma do sistema de controlo: sistema operacional Windows 7
- Horário de trabalho: 8h
- Funções básicas: o comando remoto e o monitor estão integrados num modelo portátil, equipado com uma alça de ombro ergonómica; podem ser utilizados para visualização e controlo simultâneos,apresentar de forma estável as imagens do local ao ambiente circundante aos operadores remotosPode exibir o estado da bateria, o ângulo de inclinação do robô, o ângulo de azimute, e informações de alarme de concentrações de gases tóxicos e nocivos em tempo real, e controlar o robô para avançar,para trás, girar, etc. Ele também pode controlar o monitor de incêndio para se mover para cima, para baixo, para esquerda, para direita, alternar entre corrente contínua e atomização, e executar ações de auto-balanço.tem a função de recolher e transmitir em tempo real as imagens da frenteO método de transmissão de dados é a transmissão sem fio usando sinais criptografados.
- Função de monitorização panorâmica: pode exibir a imagem de 360 graus do corpo do robô em tempo real.
- Função de gravação e reprodução de vídeo: pode gravar vídeos a qualquer momento.O vídeo também pode ser copiado para outros dispositivos.
- Função de lançamento de tela: pode ser conectado a um dispositivo de projeção, como um projetor, através de uma interface HDMI, o que é conveniente para os comandantes de operação discutir e tomar decisões juntos.
- Função de controlo de movimento: através de um joystick industrial de três eixos, o robô pode ser operado de forma flexível para avançar, recuar, virar à esquerda e virar à direita.
- Função de controlo do monitor de incêndio: através de um joystick industrial de três eixos, o monitor de incêndio pode ser controlado para se mover para cima, para baixo, para a esquerda, para a direita, para alternar entre corrente contínua e atomização.
- Interruptor de controlo para o levantamento do sistema de reconhecimento: realizado através de um interruptor momentâneo de auto-reinicialização.
- Interruptor de vídeo: realizado através de um interruptor momentâneo de auto-reinicialização.
- Interruptor de controlo para a função automática de reboque de mangueiras de água: realizado através de um interruptor momentâneo de auto-reinicialização.
- Função de controlo do iluminador: Realizada através de um interruptor momentâneo de auto-reinicialização, e o computador anfitrião faz uma resposta de auto-bloqueio.
- Ferramentas auxiliares: cinto de ombro para o terminal de controlo remoto portátil, tripé móvel
|






























 Por favor verifique seu email!
Por favor verifique seu email!